
家电中的电气负载,例如马达、阀门、灯管或者加热器等等,都需要接通或切断输送给它的功率,有些则要 求输入功率能够在一定范围内改变。使用双向可控硅(TRIAC: Tri-electrode AC switch)的固态功率控制电路具有 简单、可靠、价格低廉的优点,在负载功率变化的家电中得到广泛的应用。但是用普通的 Triac 控制感性负载会 出现不受控的情况,而新的三象限 Triac 解决了普通 Triac 使用时出现的问题。
用相位控制来改变功率
家电中的马达不论是分段调节或者是连续调节,大都采用串联式交流马达。可以用电子转速控制电路来提高 平均驱动电压,以维持较稳定的输出速度。对於要求成本低的系统,使用 Triac 的相位控制电路是个很好的方案。
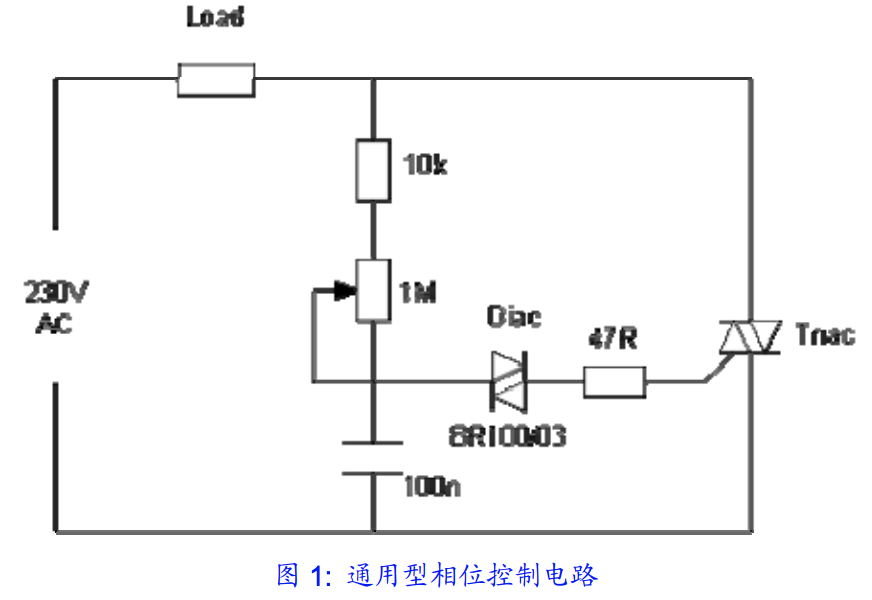
正确地设计相位控制电路、正确地选用 Triac,就可以实现可靠、简单、经济的控制电路。图 1 是一个简单 的例子,其中只用了 6 个元件:一只 Triac、两个电阻器、一个电容器、用於触发 Triac 的双向触发二极管(DIAC, DI-electrode AC switch),以及用於设定触发延迟时间的可变电阻器,图中没有为满足 EMC 要求所需要的滤波元 件。
图 1 中的 100nF 电容器通过固定与可变电阻器充电到二极交流开关的击穿电压,大约为 32V。加在 Triac 控 制极上的电流脉冲触发 Triac 使之在随後的半个交流电周期中导通,在电源为正半周时,这个过程重复发生,图 中 10kΩ 的电阻器用来避免过高的电流流到 100nF 电容器而造成损坏,1MΩ 的可变电阻器的作用是控制电容器 的充电速度,从而改变触发脉冲的相位角,控制负载上的平均功率。
要确保正确地进行触发,在IGT处在最高电平的时间最少为 10μs,这是由 47Ω电阻器来做到的,它限制了振 幅,同时延长控制极上脉冲延续的时间,控制极电流脉冲的幅度至少要等於Triac额定的IGT最大值以确保正确地 触发。
相位控制电路也广泛地用於电灯的亮度调节。这个电路可以用於电阻性负载,也可以被用到电感性负载上。 这两种负载对 Triac 的要求有很大的差别,因此必项针对不同的情况正确地选择 Triac。图 2 是负载为电阻性与电 感性时的波形。
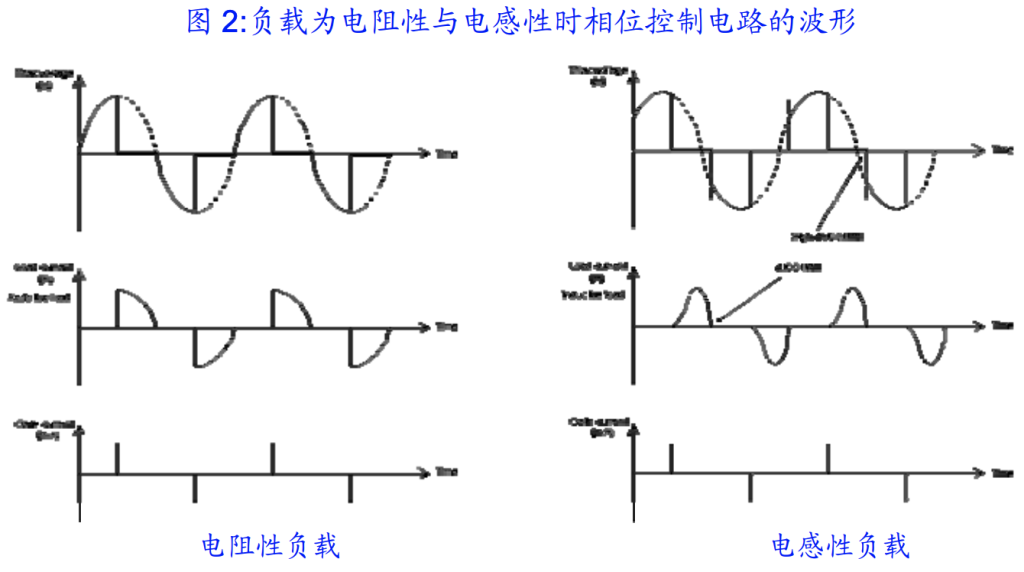
对 Triac 来说,电阻性负载是容易控制的,因为:
一、负载上电流的波形与输入电压的波形相同,因此 Triac 的换向时电流的变化速度 dI/dt 相当和缓;
二、电压与电流波形相位相同,因此换向後的电压上升变化(dV/dt)相当和缓,理论上换向时电压变化率 dv/dt 为:
对於 230V 的 50Hz正弦波来说,dV/dt的数值仅 0.1V/s。利用IRMS,这个公式也可以用来计算dI/dt。然而, 对於电感性负载,问题就不这麽简单:
一、由於负载电流的波型与输入电压不同,而且电感性负载会抗拒电流的任何改变,因此上升缓慢,引起波 峰出现时间延迟,但是回到 0 则很快,dI/dt 相当高,结果,在它试图回到阻断状态时,移动载流子会越来越多地 集中到 Triac 中的结上。如果集中程度很高的话,这些载流子就会流到 Triac 结,它起作用犹如控制极触发电流, 这是我们不想要的,它会在阻断电压升高时自动地使 Triac 导通。在下面我们将会谈到,某些需求很大的电路可 能会产生很大的 dI/dt,在需要阻断上升速度为 0.1V/s 这麽缓慢的 230V 50Hz 正弦波时,会防碍 Triac 进行换向。
二、在电压波形与电流波形之间存在相移,电流在相位上落後於电压,当负载电流穿越 0、而且 Triac 换向 时,它的阻断电压一定会迅速上升到电源电压的电平,它只受到电路中的电容器与 Triac 结电容的限制。电压变 化率(dv/dt) 很高时,会使得剩下的移动载流子集中到 Triac 结,形成我们并不需要的触发电流。
任何标准的 Triac 都能够成功地控制电阻性负载。然而,在用标准的 Triac 来控制电感性负载时,如果要避 免不受控的情况出现,就必须增加一些保护元件。这些元件是:跨接 Triac 的电源两端的电阻器与电容器串联的 阻尼电路,它能够限制电压变化率 dV/dt;在负载上串联一个几毫享的非饱和电感器,在 Triac 遇到问题时它能够 限制电流变化率 dI/dt。
这些额外的元件会增大体积,增加成本。在许多情况下它们甚至会使 Triac 受到过大的电流冲击,因而降低 电路长期使用的可靠性。例如,如果阻尼电路设计不当,其中的电阻过低(低於 100Ω),每当 Triac 在阻断时的高 电压下触发时可能造成过大的 Triac 峰值电流、过高的电流变化率(dI/dt)。这些过大的电流、过高的电流变化率重 复出现的话,在导开始导通的区域,在有的部位电流会太大的,从而逐渐降低控制极的可靠性。结果是:使用时 间越久,控制极的灵敏度越低,最後永远无法触发。从成本、尺寸以及可靠性的角度来看,解决这个问题最好的 方法是减小保护元件的尺寸,甚至完全不要。用三象限的双向可控硅(3Q-Triac)就可以做到这点。
三象限双向可控硅的局限性
双向可控硅 可以看作是做在一块硅片上的两只背靠背的闸流体,它们共用一个控制极。最早的标准 Triac 是一个四 象限元件,控制极的电流是正的或者是负的,MT2 极的电压为正或者为负,这四种可以任意组合。图 3 所示是触 发象限及正确的术语。
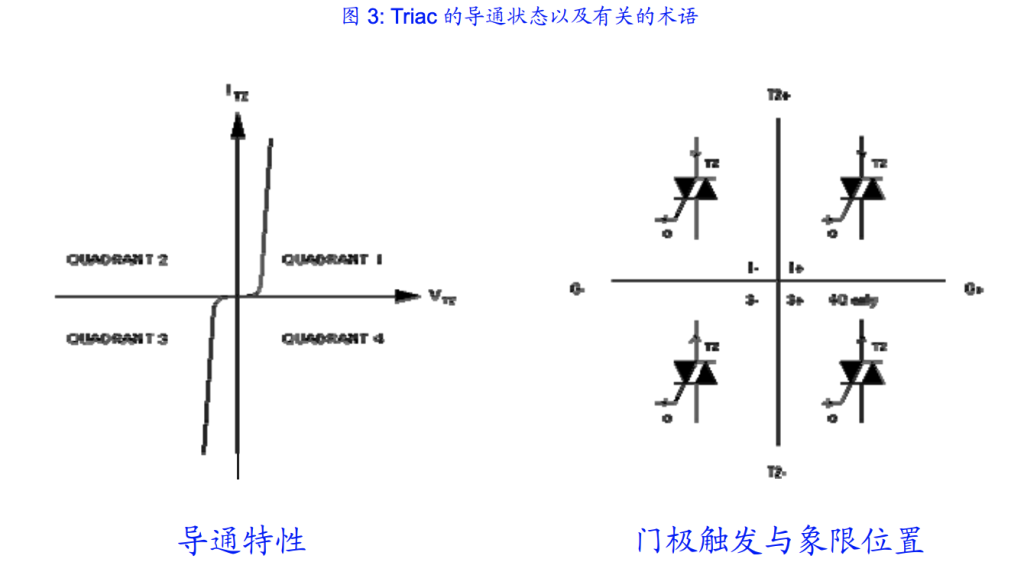
四象限 Triac 在 3+象限的触发是通过在控制极区域加入重叠作用,它使主端点 1 提供电子以触发 G-MT1 范 围内的闸流管,接著导通状态由从这个中间状态扩展到主闸流管上。然而,在这个触发模式下,载流子的流动与 现存的 1-to-3 换向(TM2 为正与 TM2 为负)非常相似。因此在负载大时,1-to-3 换向很有可能被误认为是正确 的 3+触发信号。也就是说,Triac 在 3+象限的触发能力会受换向效能所影响,从而降低对误导通与失控的防护能力。
四象限到三象限 Triac 的改进
三象限 Triac 中,去掉了控制极重叠的功能,这样移除可以让它能够在高电压(dv/dt)以及电流(dI/dt)变动的情 况下转向,如果有的话,这个作法仅有的一点缺点是完全失去了任何的 3+触发能力,不过对大部份的应用来说 这并不重要,因为在 3+象限的运作通常会因为 Triac 的更低灵敏度、更差的导通效能以及更低许可的负载电流变 化(dIT/dt)而避免。
3+象限(象限 4)为所有象限中最不常被使用的,例如图二中离散式相位控制电路中的自动触发线路会自动 地在 1+与 3-象限中运作,同时,由逻辑晶片或微控器所提供的单向触发脉冲控制线路通常是以吸入(sink)闸极电 流的方式设计,因为这比提供电流要容易地多,因此 Triac 会在 1-与 3-象限间运作,依循设计者指定的方式,轻 易地避开 3+象限。
其他能够帮助三象限 Triac 将转向能力最佳化的附加功能包括:
两个非平行闸流体分开安排,以及降低其中一半转向时对另一半的影响。
对射极短路径的布局与阻抗予以最佳化来限制电晶体的放大率,同时快速且安全地将移动电荷载体导开,避 免他们在转向是造成不必要的闸极驱动电流。
除了电压变化(dV/dt)以及电流变化(dI/dt)的好处之外,三象限 Triac 的优点还包括阻断电压高速变化(dVd/dt) 更佳的免役能力,以及在最灵敏状态下高温时更佳的控制能力。
温度与 Triac 灵敏度的关系:基本上,在温度较高的环境中,无可避免地 Triac 会变得越来越灵敏,它变得 容易被导通,不管是透过外加闸极电流的蓄意动作,或者是意外由内部产生的漏电流或电容偶合电流所引起,如 果 Triac 的接面温度超过了额定温度的最大值(Tj Max),那麽就可能会达到内部漏电流大到足以让 Triac 导通的温 度,这个错误的情况代表了完全的失控,三象限 Triac 将会比同级四象限 Triac 在高温时更容易维持较佳的控制 状态,我们将在稍後说明。
触发电流(IGT)与转向性的权衡:灵敏度较高的Triac虽然比较容易导通,但是也比较容易被误导通,也就是说, 以相同的技术而言,拥有最低触发电流(IGT)的最灵敏Triac对错误触发的免役力也最低,因此转向的效能表现也最 差,我们可以得到这样的结论:转向效能与闸极电流大小成正比或者也可以说转向效能与灵敏度成反比因为高灵 敏度也就等於低闸极电流IGT。
对相同灵敏度而言,三象限Triac同时也提供了比四象限Triac更好的转向表现。在为应用选择三象限Triac时, 设计者必须要在灵敏度以及失控免役力之间做最好的权衡,并尽可能地采用二极交流开关来做触发电路,并选择 拥有最高触发电流(IGT)的最差灵敏度Triac,同时指定最佳的转向效能,当驱动电路能够吸入的闸极电流有所限制 时,应该选用拥有最高闸极电流的Triac以便让驱动电流能够正确地动作,基本上,在驱动电路能够在没有太大困 难情况下吸入更多闸电流时,自动指定拥有最高灵敏度的Triac并不是一个好的作法。
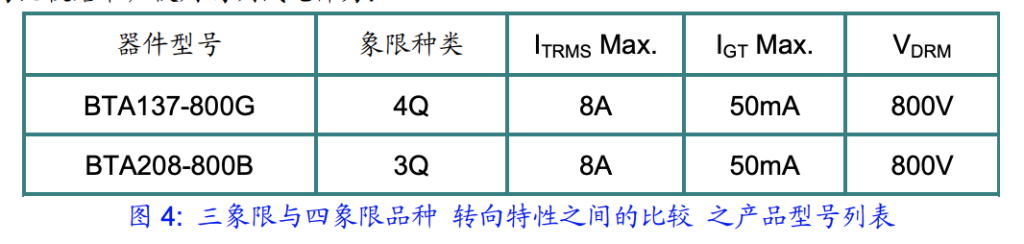
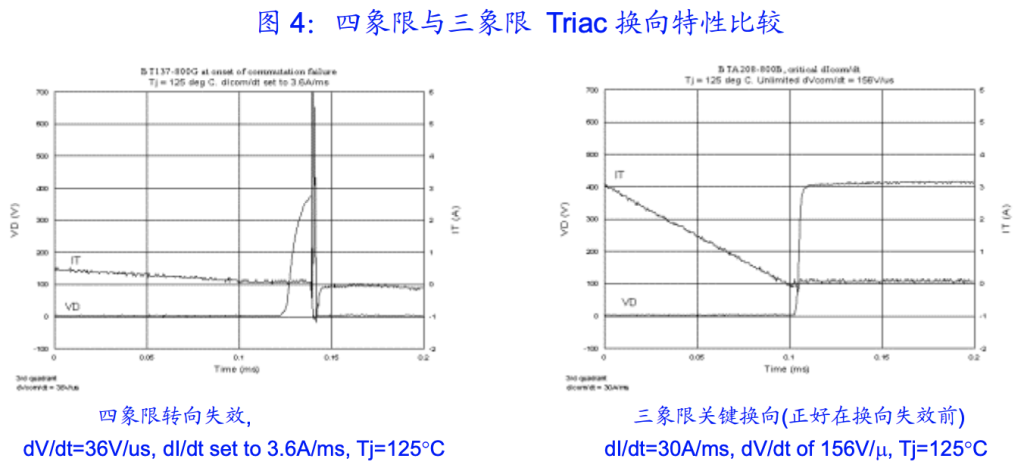
3Q 与 4Q Triac (三象限与四象限) 转向特性之间的比较 三象限与四象限 Triac 在放到转向特性测试仪器下,比较 Tj=125(C 时最大的电流变化(dI/dt)与电压变化(dV/dt) 能力,图 4 为比较结果,使用的测试元件为:
整流电感性负载代表更高的电流变动(dI/dt):整流後的电感性负载为控制用 Triac 转向特性最严苛的要求之 一,当供应电压趋近於 0 时,如果低於电感性负载所产生的电压将会到达一个交叉点,当负载电流在桥式整流二 极体上产生飞轮现象时,桥式整流器交流端的电流会快速降到 0,而 Triac 上的高电流变化(dI/dt)只受桥式结构交 流端的寄生电感所限制,这将会造成大部份的四象限 Triac 以及部份较为灵敏三象限 Triac 的转向可靠度变差, 较为灵敏的四象限 Triac 甚至将无法在 230V 50M 正弦波的 0.1V/s 由 0 电压开始上升时正确转向,此时就算是加 上缓冲电路也无济於事,因为电压变动率(dV/dt)已经很低了。
解决这个问题的一个方法是加上串联的非饱和电感来限制电流变化(dI/dt)到 Triac 能够转向的程度,同时也需 要一个 RC 缓冲电路来延缓任何可能造成的过度电压变化(dV/dt),并且帮助 Triac 来忍受电流的变化(dI/dt)。
较好的解决方法则是采用拥有最高闸极电流(IGT)以及最佳转向表现的三象限 Triac,因此我们可以省下所有 的保护元件,同时保证能在到达额定最高接面温度前正确地运转,也就是说,三象限双向是唯一可行的选择。
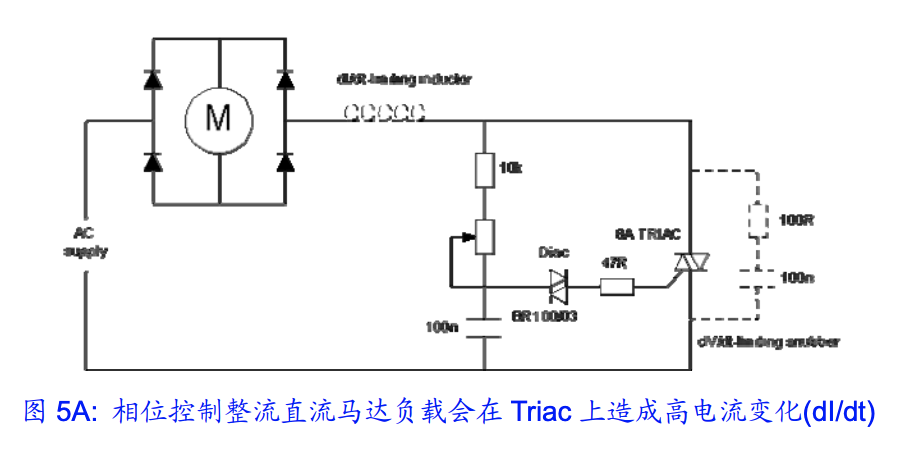
实际应用举例:整流的小型家电用马达
图 6A 中为一个相位控制的整流直流永磁式马达,通常使用在小型的手握式厨房设备中,我们采用在稍早转 向性测试中使用的 Triac 元件到实际应用上测试,接面温度(Tj)为 125°C 。
在图 5B 中我们可以看到四象限 Triac 转向失效的情况,在转向时的高电流变化(dI/dt)可以看做是持续通过 0 点,而不需 Triac 的阻断电压。在负载上串连 4m 亨利(Henry)的电感能够把电流变化延缓,使得四象限 Triac 能 够转向,请见图五 C。
图 5D 则显示出三象限 Triac 能够在没有任何保护元件帮助的情况下成功转向。
图 6 则为两种 Triac 形式的电压变化(dV/dt)与电流变化(dI/dt)相对图。
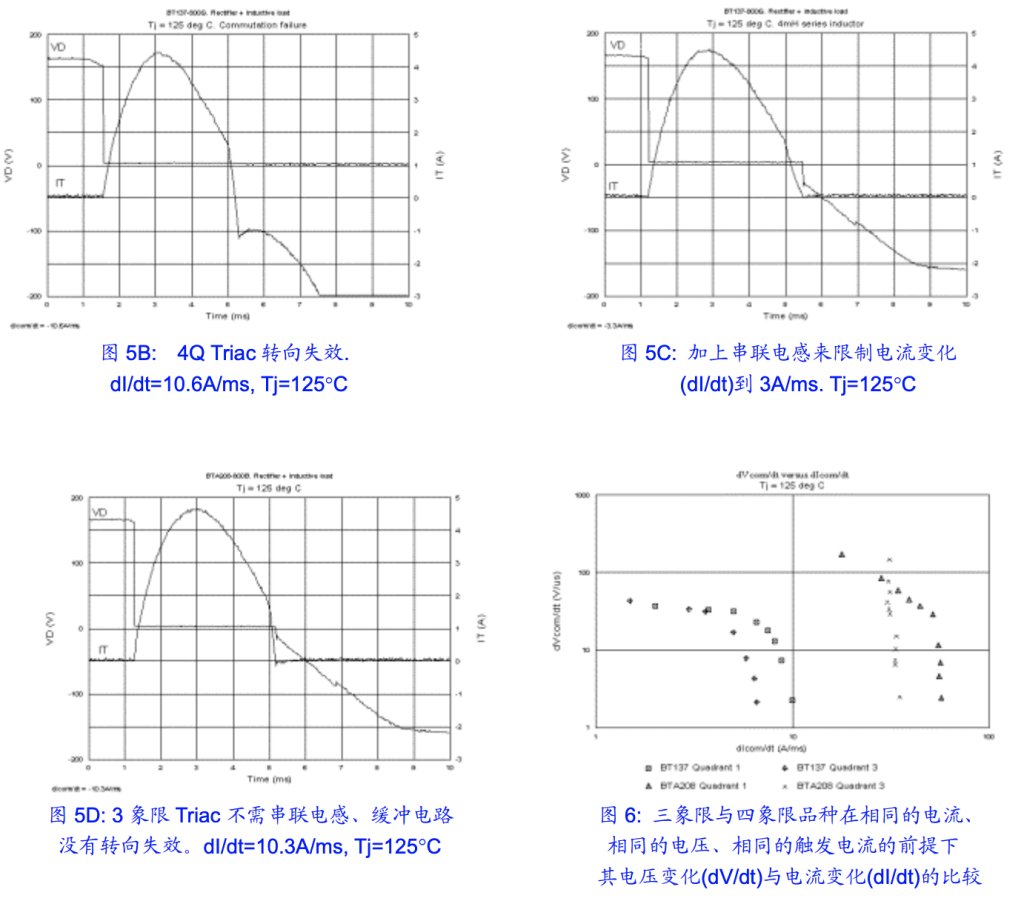
高温测试:在整流直流 PM 马达电路中测试的 Triac 会在一个电压点截止,但温度会一直上升直到 Triac 失 控为止,也就是转向失效,失效发生点的温度越高,就代表 Triac 的转向特性越佳,所有测试的 Triac 都采用 8A、 600V 规格以便比较,转向失效温度请见表一,在这里,加入了三象限 Triac 的较灵敏例子以便表示转向特性与温 度变化的关系,在这个测试中电路造成的转向情况为: dI/dt=8.52A/mS 与 dV/dt=20V/μS
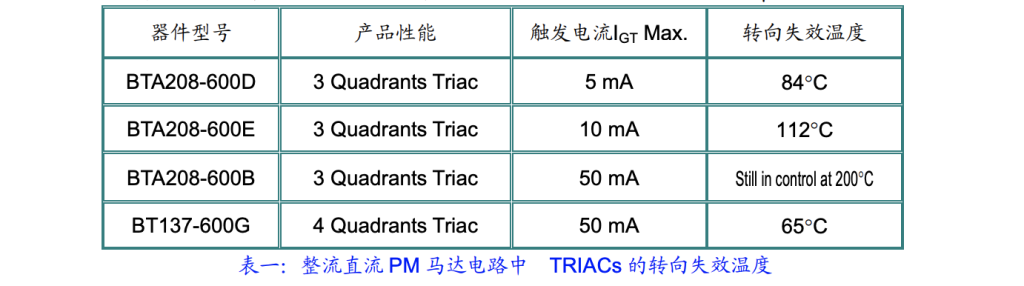
从结果中可以轻易看出三象限 Triac 比起传统四象限技术的好处,灵敏度最差的三象限 Triac 在 200°C 测试 时对失效控制的免役程度还是相当的高,下一段的静态电压变化(dV/dt)测试将会进一步加强这一个论点。
200°C 为热度在安全温度保险丝烧断前所能达到的最高温度,因此不可能达到 Triac 的转向失效温度。
200°C 比额定 125°C 接面温度要高得多,因此 200(C 的成功测试并不代表三象限 Triac 能够常常处在 125°C 的温度之上,因为如果工作接面温度常常超过额定值的话,将会降低元件的长期可靠度以及使用寿命。 三象限与四象限 Triac 静态电压变化(dV/dt)的比较:在转向特性比较中所使用的相同 Triac 同时也用来测试电压变 化的比较,结果如图 7:
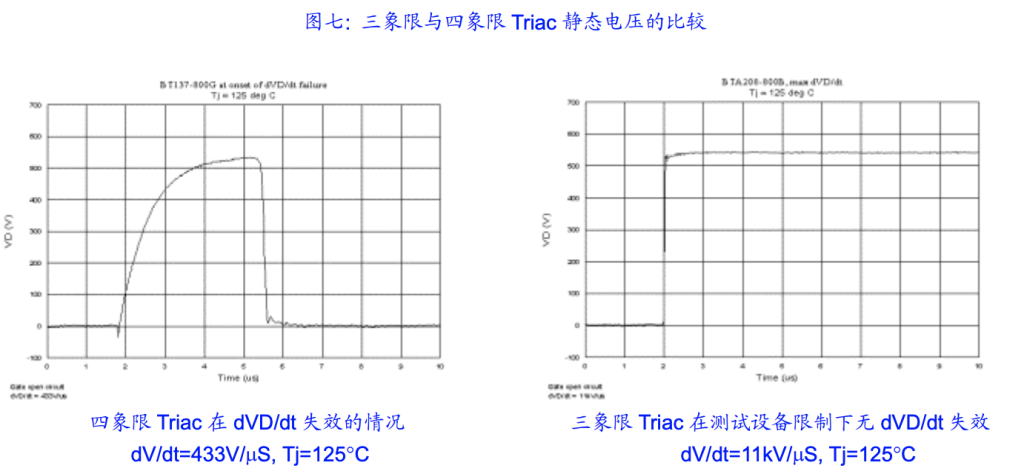
总结:
与传统四象限 Triac 比较时,在较严苛的情况下运作时,新型的三象限 Triac 对误动作导通以 及失控上拥有较佳的免役性,这些情况包括:
◇非线性或反动式负载,会在 Triac 上造成高电压变化(dv/dt)与电流变化(dI/dt)
◇接近最高接面温度时的高温运作,这时 Triac 会变得更灵敏且更容易失控
◇在阻断状态时,高杂讯电路会在 Triac 上造成高电压变化(dVD/dt)
对家电制造商的好处
三象限 Triac 的强化效能为 OEM 厂商带来下列的好处:
◇可以节省或精简传统四象限 Triac 稳定运作时所必须的保护或缓冲电路及电感
◇电路更简化
◇电路更精简
◇整体系统成本更低
◇失控的免役程度更高
◇由于去除了会对 Triac 形成压力的保护元件,因此拥有更长效的可靠度。







评论 (0)